
Sastav
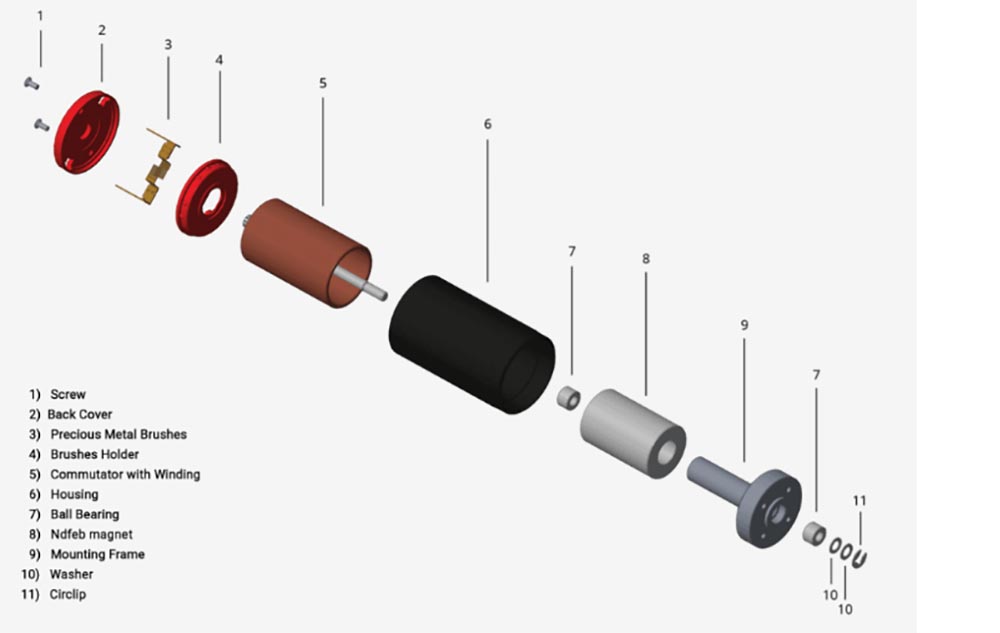
1. Motor s permanentnim magnetom istosmjerne struje:
Sastoji se od statorskih polova, rotora, četkica, kućišta itd.
Statorski polovi izrađeni su od permanentnih magneta (čelik s permanentnim magnetima), ferita, alnika, neodimija, željeza, bora i drugih materijala. Prema strukturnom obliku mogu se podijeliti na nekoliko tipova, kao što su cilindrični i pločicasti.
Rotor je općenito izrađen od laminiranih silicijskih čeličnih limova, a emajlirana žica je namotana između dva utora jezgre rotora (u tri utora nalaze se tri namota), a spojevi su zavareni na metalnim limovima komutatora.
Četkica je vodljivi dio koji spaja napajanje i namot rotora te ima dva svojstva vodljivosti i otpornosti na habanje. Četkice motora s permanentnim magnetima koriste jednostruke metalne ploče ili metalne grafitne četkice te elektrokemijske grafitne četkice.
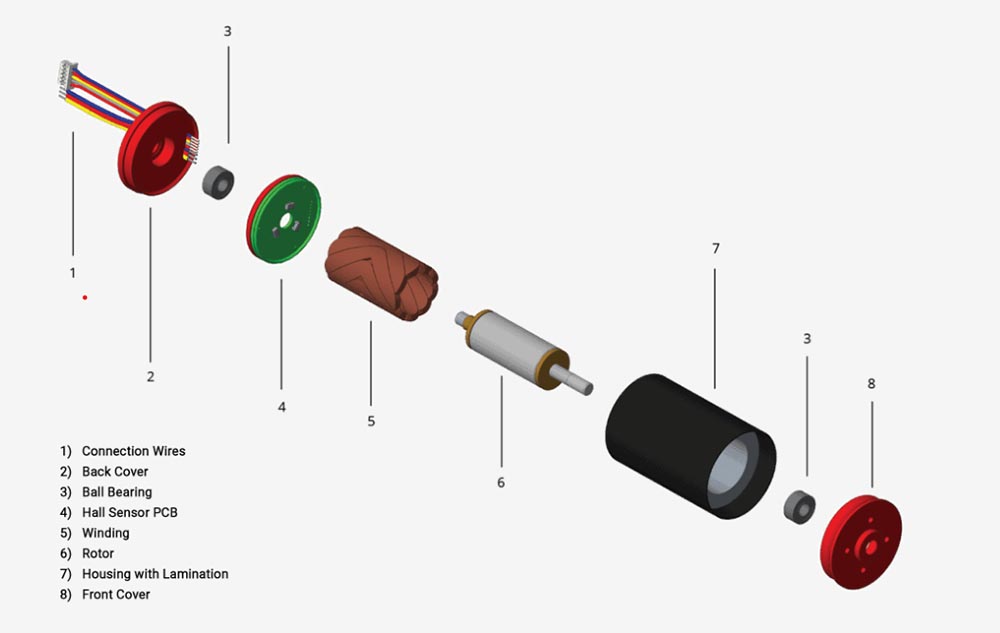
2. Bezčetkični istosmjerni motor:
Sastoji se od rotora s permanentnim magnetom, statora s višepolnim namotom, senzora položaja i tako dalje. Bezčetkni istosmjerni motor karakterizira se time što je bezčetkičan i koristi poluvodičke sklopke (kao što su Hallovi elementi) za ostvarenje elektroničke komutacije, odnosno elektronički sklopki se koriste za zamjenu tradicionalnih kontaktnih komutatora i četkica. Ima prednosti visoke pouzdanosti, bez iskrenja komutacije i niske mehaničke buke.
Senzor položaja komutira struju statorskog namota određenim redoslijedom prema promjeni položaja rotora (tj. detektira položaj magnetskog pola rotora u odnosu na statorski namot i generira signal osjetnika položaja na određenom položaju, koji se obrađuje u krugu za pretvorbu signala, a zatim uklanja. Upravlja krugom prekidača napajanja i prebacuje struju namota prema određenom logičkom odnosu).

2. Bezčetkični istosmjerni motor:
Sastoji se od rotora s permanentnim magnetom, statora s višepolnim namotom, senzora položaja i tako dalje. Bezčetkni istosmjerni motor karakterizira se time što je bezčetkičan i koristi poluvodičke sklopke (kao što su Hallovi elementi) za ostvarenje elektroničke komutacije, odnosno elektronički sklopki se koriste za zamjenu tradicionalnih kontaktnih komutatora i četkica. Ima prednosti visoke pouzdanosti, bez iskrenja komutacije i niske mehaničke buke.
Senzor položaja komutira struju statorskog namota određenim redoslijedom prema promjeni položaja rotora (tj. detektira položaj magnetskog pola rotora u odnosu na statorski namot i generira signal osjetnika položaja na određenom položaju, koji se obrađuje u krugu za pretvorbu signala, a zatim uklanja. Upravlja krugom prekidača napajanja i prebacuje struju namota prema određenom logičkom odnosu).
3. Brzi motor bez četkica s permanentnim magnetom:
Sastoji se od jezgre statora, magnetskog čeličnog rotora, sunčanog zupčanika, spojke za usporavanje, kućišta glavčine i tako dalje. Hallov senzor može se montirati na poklopac motora za mjerenje brzine.
Usporedba motora s četkicama i motora bez četkica
Razlika u principu elektrifikacije između motora s četkicama i motora bez četkica: Motor s četkicama mehanički komutira ugljična četkica i komutator. Motor bez četkica elektronički komutira regulator na temelju indukcijskog signala.
Princip napajanja motora s četkicama i motora bez četkica je različit, a različita je i unutarnja struktura. Kod motora s glavčinom, izlazni način okretnog momenta motora (bilo da ga usporava mehanizam za smanjenje prijenosa) je drugačiji, a različita je i mehanička struktura.
bezjezgreni četkani istosmjerni motor
bezjezgreni istosmjerni motor bez četkica
Vrijeme objave: 03.06.2019.